Hi Albert,
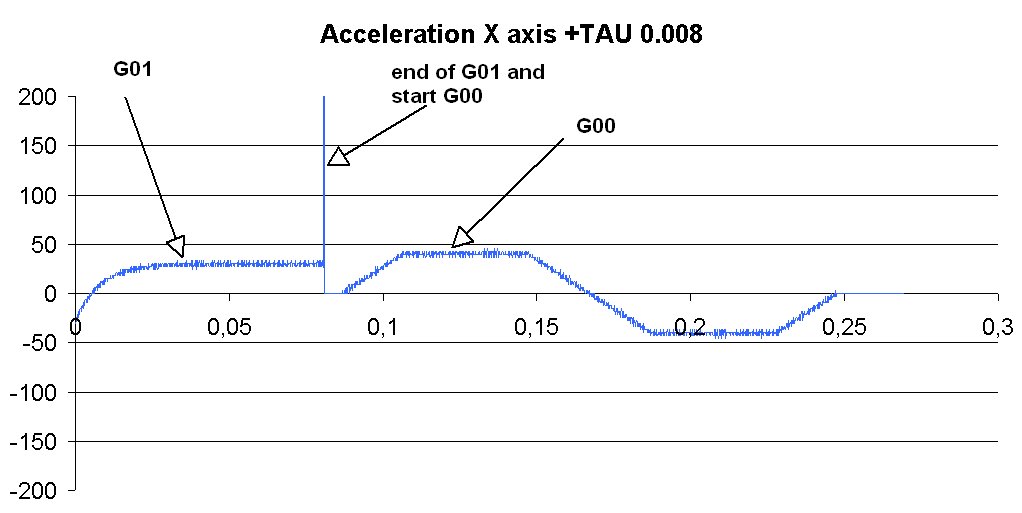
I think we have a solution. The problem was caused by the small lag introduced by the Low Pass Filter. Previously when we came to the end of a Coordinated Motion Path the motion just stopped. Unfortunately the "Smoothed" motion was slightly lagging behind and did not completely reach the final position and also was still moving at a non-zero velocity. Suddenly stopping represents an infinite deceleration. We now introduce a cubic spline to complete the final small motion. A given starting position, ending position, starting velocity, ending velocity, and time duration is sufficient to completely define a cubic spline. We have the initial position and velocity from where the Path ended. We also know what the final target position should be,
and that our final velocity should be zero. The only variable left is the time duration. Using 2xTau seems to work well. See a description and motion capture at the very end of this document. Notice the velocity is now continuous without any acceleration spikes.
Hoping to release this soon.
Regards
TK
| Group: DynoMotion |
Message: 4565 |
From: albertplatek |
Date: 4/16/2012 |
| Subject: Re: G01/G00 + TAU Low Pass Filter [1 Attachment] |
Hi Tom,
KFLOP will now have best Trajectory Planner among other CNC controllers what I know.
TP should be faultless with all latest patches.
Thanks a lot for help and great support here!
Best regards
Albert Platek
--- In DynoMotion@yahoogroups.com, Tom Kerekes <tk@...> wrote:
>
> Hi Albert,
> Â
> I think we have a solution. The problem was caused by the small lag introduced by the Low Pass Filter. Previously when we came to the end of a Coordinated Motion Path the motion just stopped. Unfortunately the "Smoothed" motion was slightly lagging behind and did not completely reach the final position and also was still moving at a non-zero velocity. Suddenly stopping represents an infinite deceleration. We now introduce a cubic spline to complete the final small motion.  A given starting position, ending position, starting velocity, ending velocity, and time duration is sufficient to completely define a cubic spline. We have the initial position and velocity from where the Path ended. We also know what the final target position should be, and that our final velocity should be zero. The only variable left is the time duration. Using 2xTau seems to work well. See a description and motion capture at the very end of this
> document. Notice the velocity is now continuous without any acceleration spikes.Â
> Â
> http://www.dynomotion.com/Help/KMotionCNC/TrajectoryPlanner.htm
> Â
> Hoping to release this soon.
> Â
> Regards
> TK
> Â
>
> From: Albert PÅatek <albertplatek86@...>
> To: DynoMotion@yahoogroups.com
> Sent: Friday, April 13, 2012 3:31 AM
> Subject: [DynoMotion] G01/G00 + TAU Low Pass Filter [1 Attachment]
>
>
> Â
> [Attachment(s) from =?ISO-8859-2?Q?Albert_P=B3atek?= included below]
> Hi Tom,
>
> Is it possible to reduce high acceleration jump between G01 - G00 moves with TAU Low Pass Filter.
>
> If it is complex problem please dont look for it, it is not very important.
>
> Software:
> KMotionCNC 4.29z
> + "Fix5milRaduis/DSPKFLOP.out"
> + "FixTP429/GCodeInterpreter.
> dll"
>
>
> TAU 0.008
> Acceleration X Axis 30
>
> See attached photo
>
> Best Regards
> Albert PÅatek
> |
|
| |
{kind=link}